01、機器人開關經常跳或者不能合閘?
原因:
1.開關老化;
2.開關選型不對;
3.水泵卡死或電機內部短路;
4.線路老化,短路,用線過小或者缺相。
解決辦法:
將控制系統的電源關掉,然后用繞表量電機,電路的三相是否有短路或接地現象(測量時注意:要把變頻輸出端拆下來,以免測試時把變頻輸出的模塊燒壞),用手轉動電機看看是否有卡死,必要時更換開關。
02、機器人接觸器噪音大?
原因:
很可能由于接觸器的銜接觸面不平造成,表面有沙或生銹。后果會造成缺相,最后導致接觸器,開關變頻等元器件的燒壞。
解決辦法:
將控制該接觸器的負載開關打下,手動快速開關接觸器經過反復多次后如果響聲還沒有解除,需將其拆下將銜鐵磨平,或者更換新的接觸器。
03、機器人熱繼經常跳?
原因:
1.電機過載;
2.選型是否匹配;
3.否老化,主線是否過小。
解決方法:
看電機與熱繼的選型是否匹配,檢查電機確保電機正常還有此現象需要更換新的。更換新的匹配主線。
04、機器人接觸器或中繼吸合不正常?
原因:
1.線圈零圈斷路;
2.中間繼電器頭壞掉。
解決方法:
檢查線路,更換新的中繼頭。
05、機器人變頻器經常報故障?
原因:
1.參數設置不正確;
2.變頻器老化;
3.水泵過載;
4.缺相;
5.線路松動。
解決方法:
先將變頻器復位,如果短時間內重新發生相同的故障則說明變頻器不能繼續工作直至工作解除。變頻器產生的故障代碼記錄下來,對照說明書將故障解決,將電路全部緊固一次,測量三相電流,看看是否平衡。供電電源缺相造成變頻器輸入端燒壞,或變頻老化,需更換變頻器。
06、機器人維修控制器輸出輸入點不正常或不能正常運轉?
原因:
1.控制器的輸入輸出點長期頻繁動作,造成控制器內部的觸點燒毀;
2.由于觸點經過強大的電流造成;
3.程序出錯或控制器已被燒毀。
解決方法:
需要更新控制器的程序將燒毀的輸入輸出點通過軟件改到備用觸電上面用,必要時更換控制器。
07、安川機器人維修壓力不穩波動大?
原因:
1.控制器的參數未調好;
2.水泵的效率太低。
08、機器人系統時好時壞,不能正常運行?
原因:
1.線路的出現松動;
2.元器件老化。
安川機器人維修控制柜常見故障及解決方法:
示教器檢查,伺服驅動器狀態,檢查線路,緊固線路,檢查元器件必要時更換。
09、機器人漏油?
原因:
1.保養不當;
2.腐蝕性部件損壞等。
處理方法:
檢查漏油位置,確認漏油引起的部件。可通過查看圖紙等準確判斷漏油引起的部件。
10、機器人異響?
原因及解決辦法:
出現異響故障時必須到客戶現場診斷。通過仔細檢查判斷異響的軸,排出外界影響因素。查看最大力矩,檢查鐵粉等手段綜合判斷異響引起的故障。
11、機器人抖動?
診斷過程:
由于抖動區域和抖動量的區別,對于抖動的診斷成為一個難點。
現階段診斷方法:更換放大器、更換電機、更換減速機逐個排除。
改進方法:通過電流電壓檢測、鐵粉濃度檢測、機器人間隙檢測等方法進行綜合判斷。
處理方法:
1.檢查各軸的運轉情況;
2.確認抖動引起的軸;
3.確認是電氣問題還是機械問題。
12、機器人軌跡誤差?
原因:
1.軌跡偏處理;
2.現象機器人機械故障;
3.底座安裝不穩;
4.外部工裝位置偏差;
5.工件不一致;
6.焊槍等工具安裝不穩。
解決辦法:
此故障為軟性故障,需要一段時間的觀察才能準確判斷。
具體步驟:
1.做好檢查點,判斷可能性原因;
2.從可能性原因逐項進行對應處理;
3.找到最終原因維修。
13、機器人下落(很危險)?
原因:
1.保養不當;
2.腐蝕性磨損;
3.疲勞磨損。
解決辦法:
確認是什么狀態下下落、下落量多少、報警狀態。
下落狀態:
上伺服下落、不上伺服下落。
下落量:
一直下落、還是下落一段時間停止。
報警狀態:
下落報警、下落不報警。
14、機器人電氣故障?
原因:
主要是電機電流不穩定造成電機輸出力矩不穩定,導致抖動。
15、電機電流不穩定?
主要原因:
1.電機故障;
2.放大器故障;
3.連接電纜故障。
16、機械故障?
原因:
是電機輸出力矩穩定情況下,其傳動機械部件給電機的載荷不穩定造成抖動機械故障。
解決辦法:
查找是減速機故障還是軸承故障,然后針對性解決。
17、伺服跟蹤錯誤報警?
原因:
1.溝通→咨詢作業時狀態和報警時狀態;
2.診斷→通過最大力矩和現場情況診斷;
3.維修→制定維修計劃。
解決辦法:
1.確認抱閘打開(能聽到抱閘打開的聲音);
2.檢查油品情況(打開出油口取樣檢查);
3.拆下電機診斷(拆下電機單獨旋轉電)。
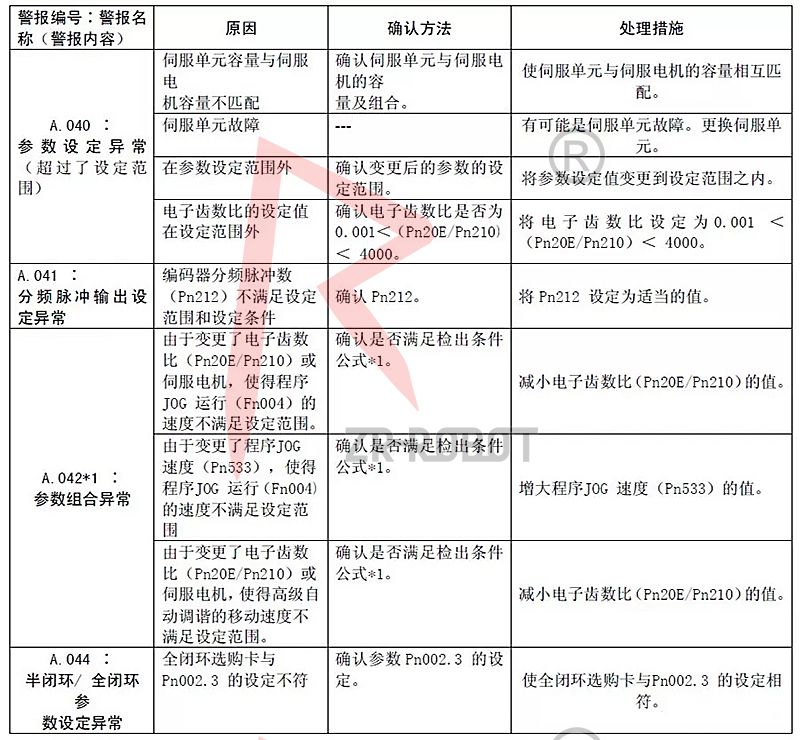
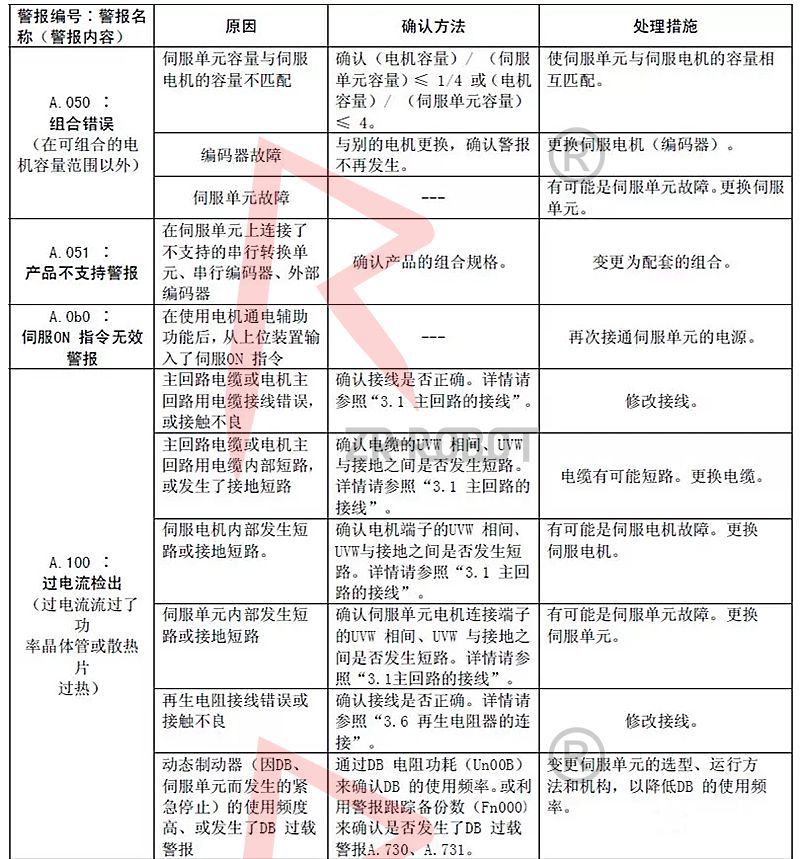
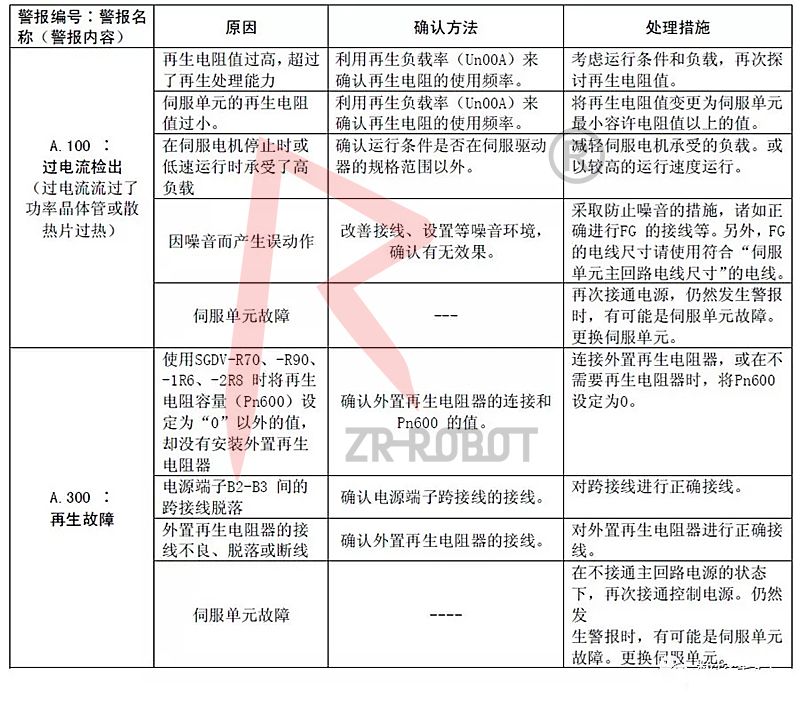
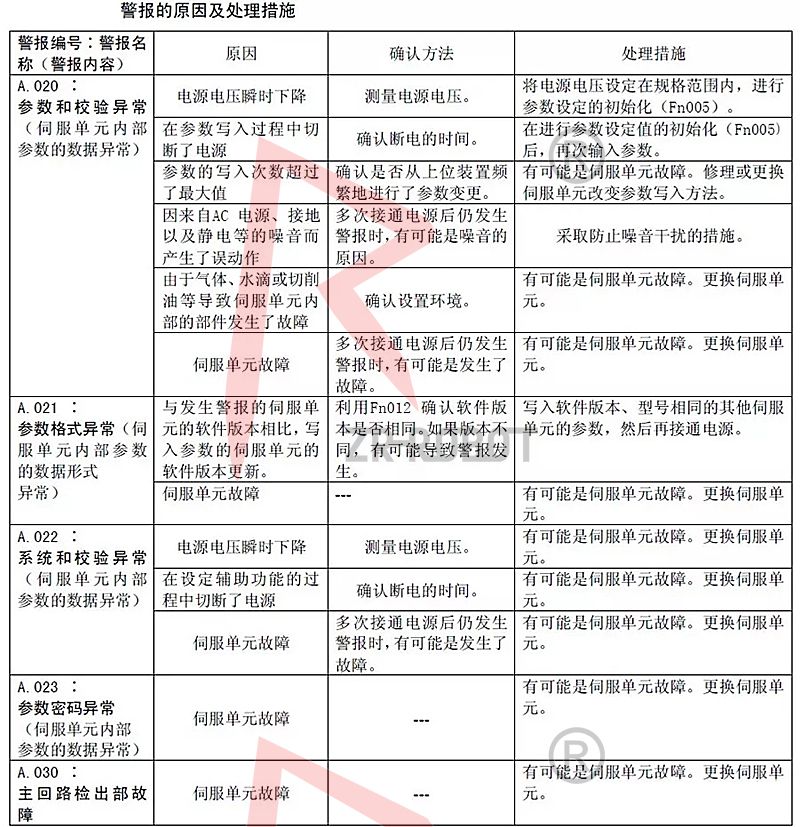
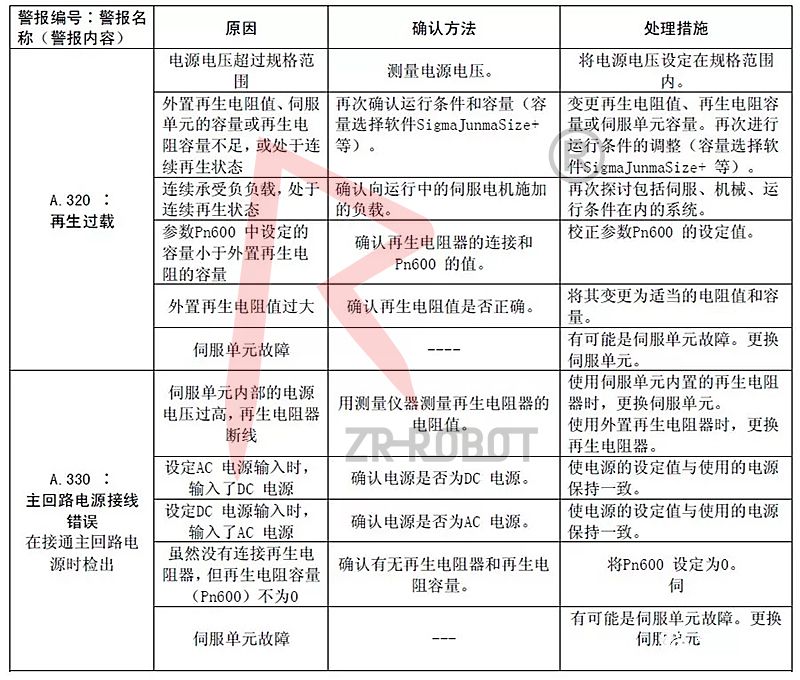
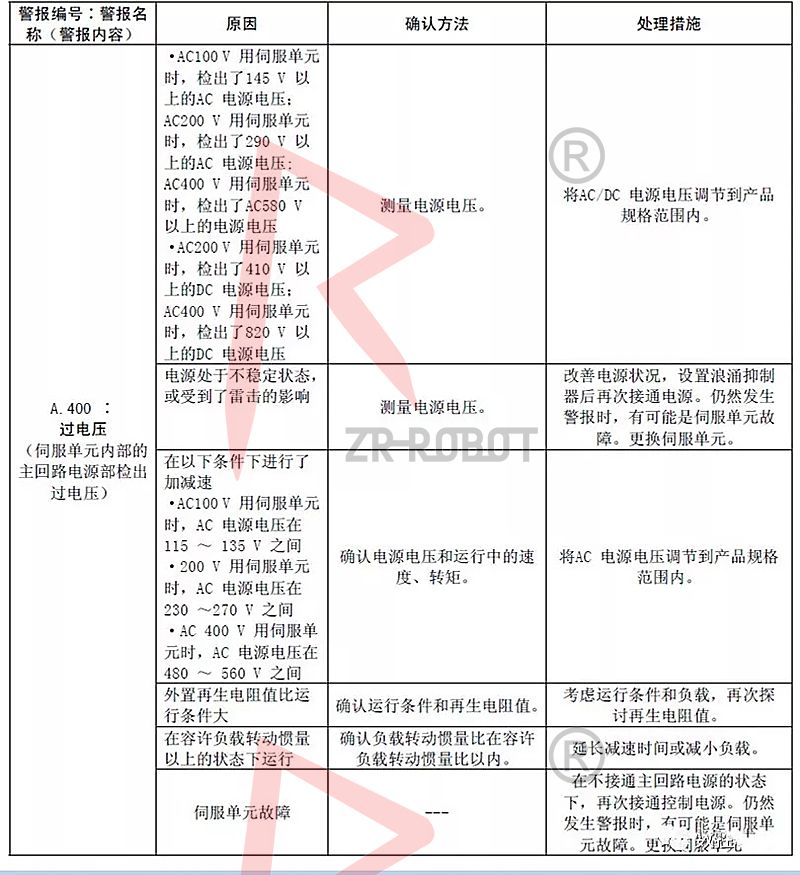
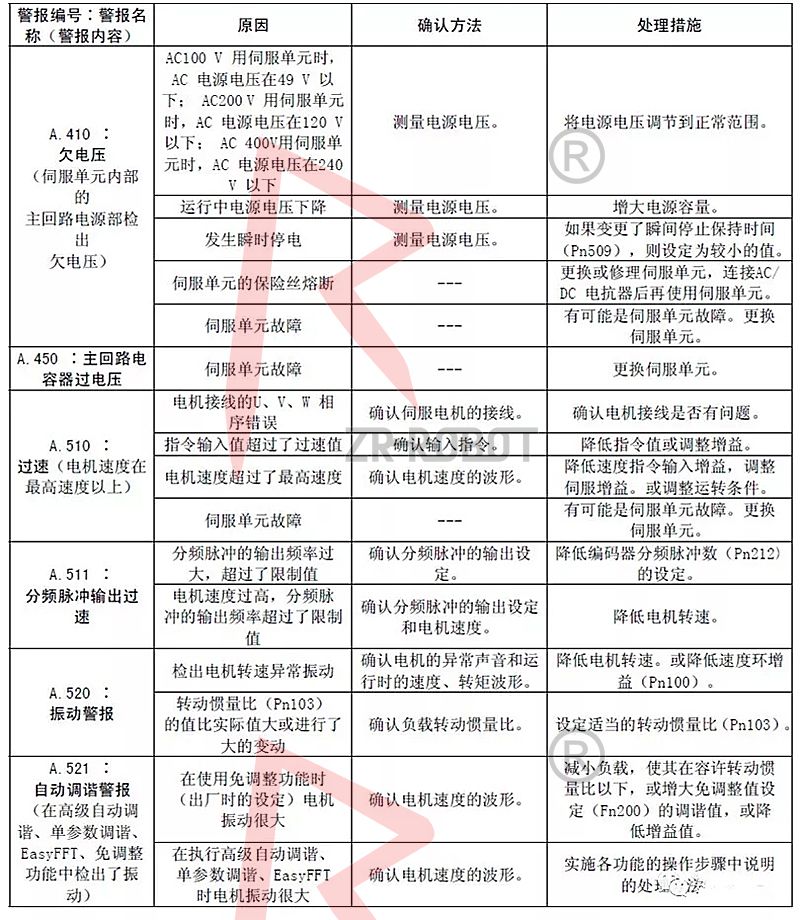
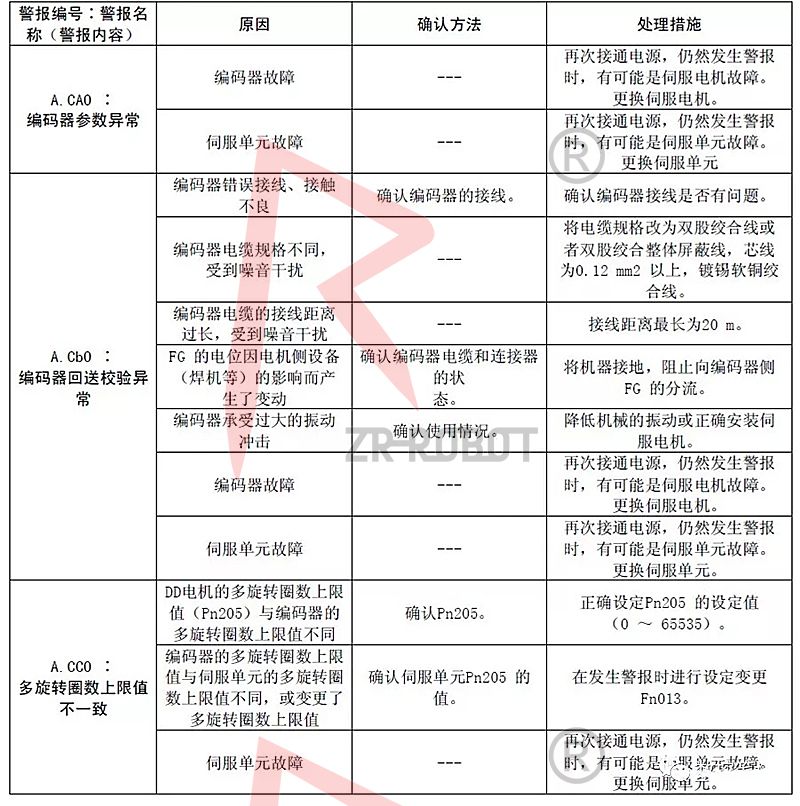
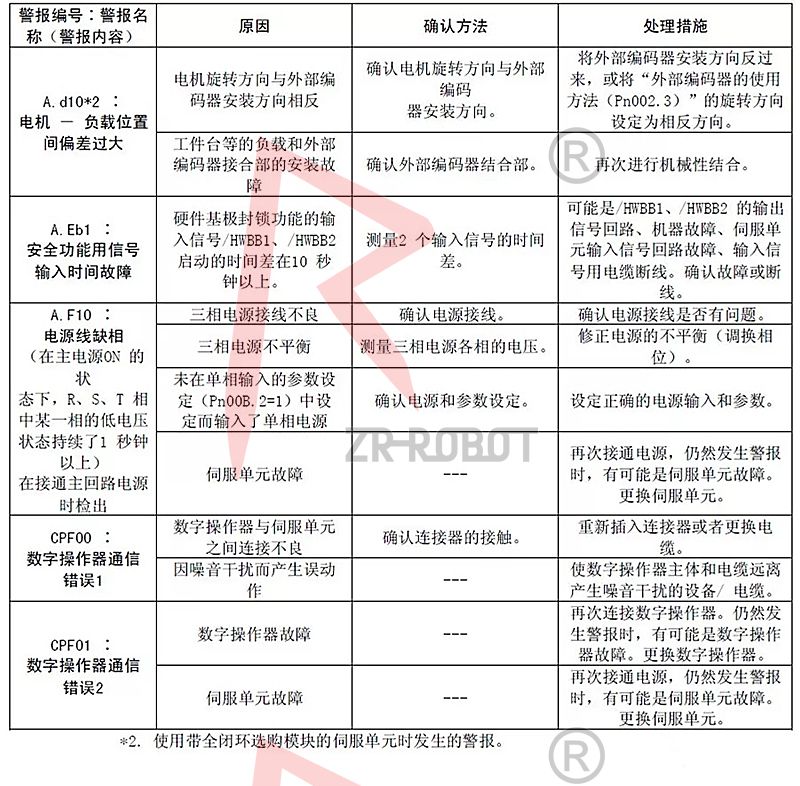
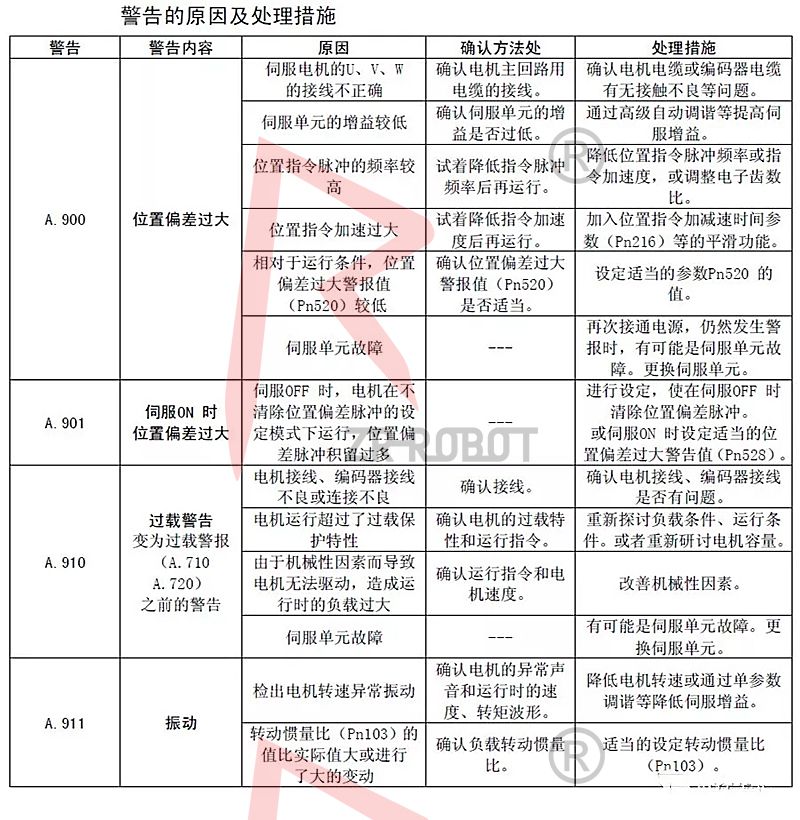
18、機器人警報的原因及處理措施?